Le Cercle
Définition
Un cercle est le lieu géométrique de tous les points du plan situés à égale distance d’un point fixe appelé centre. Cette distance constante entre le centre et n’importe quel point du cercle est appelée rayon.
Éléments du cercle
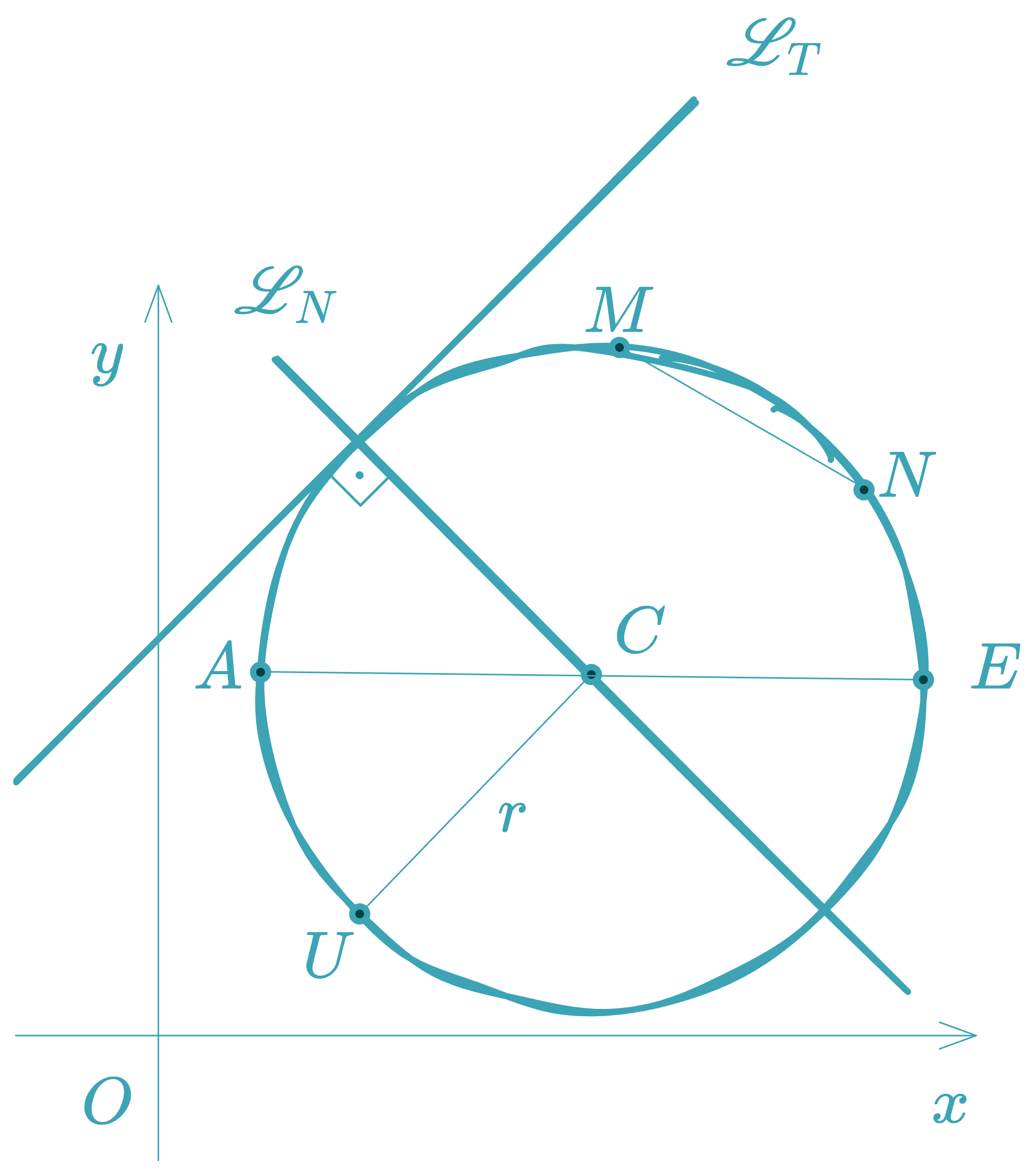
- **Centre** ($C$) : le point fixe intérieur à partir duquel tous les points du cercle sont à égale distance.
- **Rayon** ($r = CU$) : la distance du centre à n’importe quel point du cercle.
- **Diamètre** ($d$) : une corde passant par le centre. Il vérifie $d = 2r$.
- **Corde** ($\overline{MN}$) : un segment reliant deux points quelconques du cercle.
- **Arc** : une portion de la circonférence comprise entre deux points.
- **Tangente** : une droite qui coupe le cercle en **exactement un point**.
- **Sécante** : une droite qui coupe le cercle en **deux points distincts**.
Équations du cercle
1. Forme canonique (centre en )
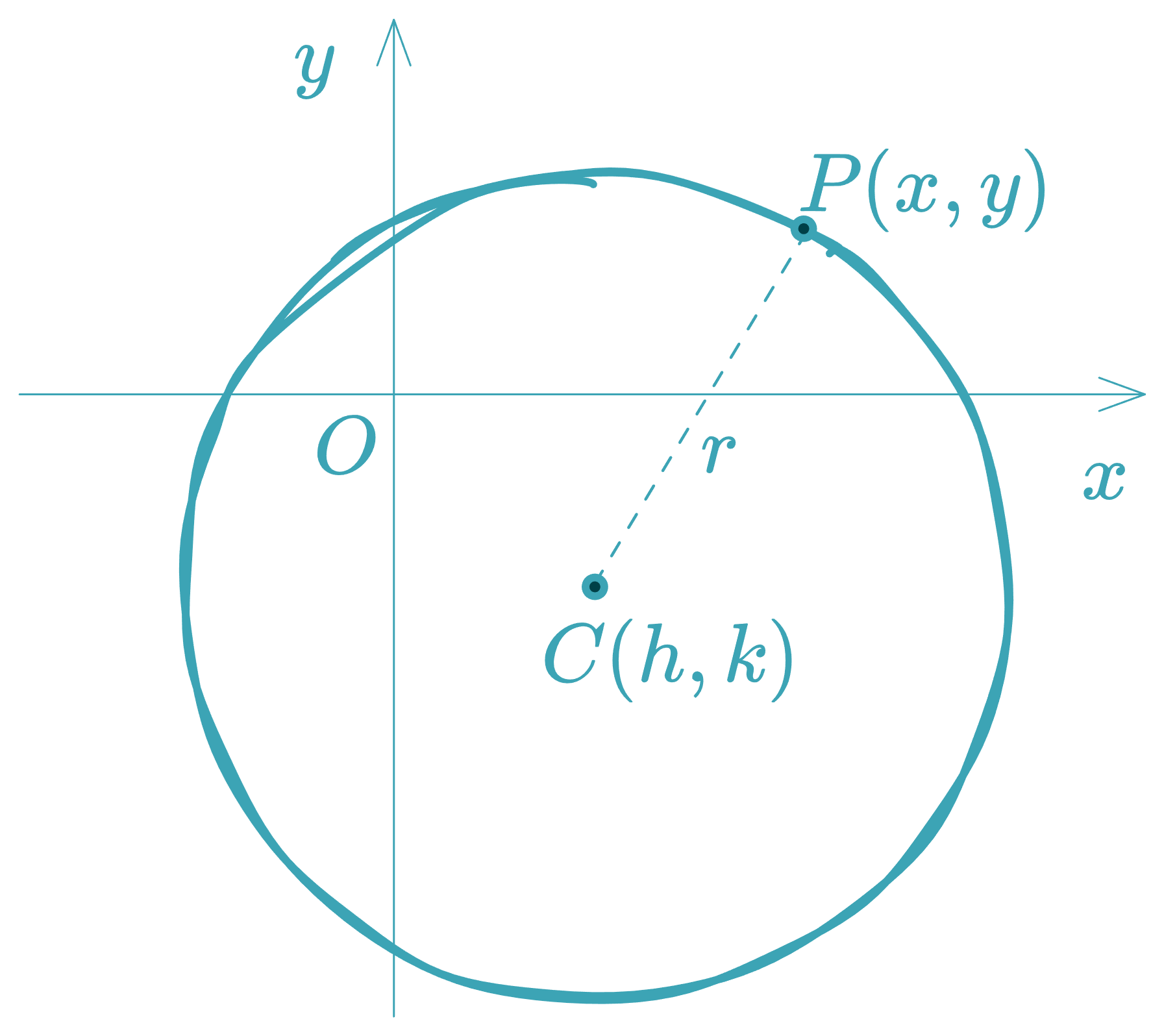
C’est l’équation d’un cercle de centre et de rayon .
2. Forme centrée à l’origine
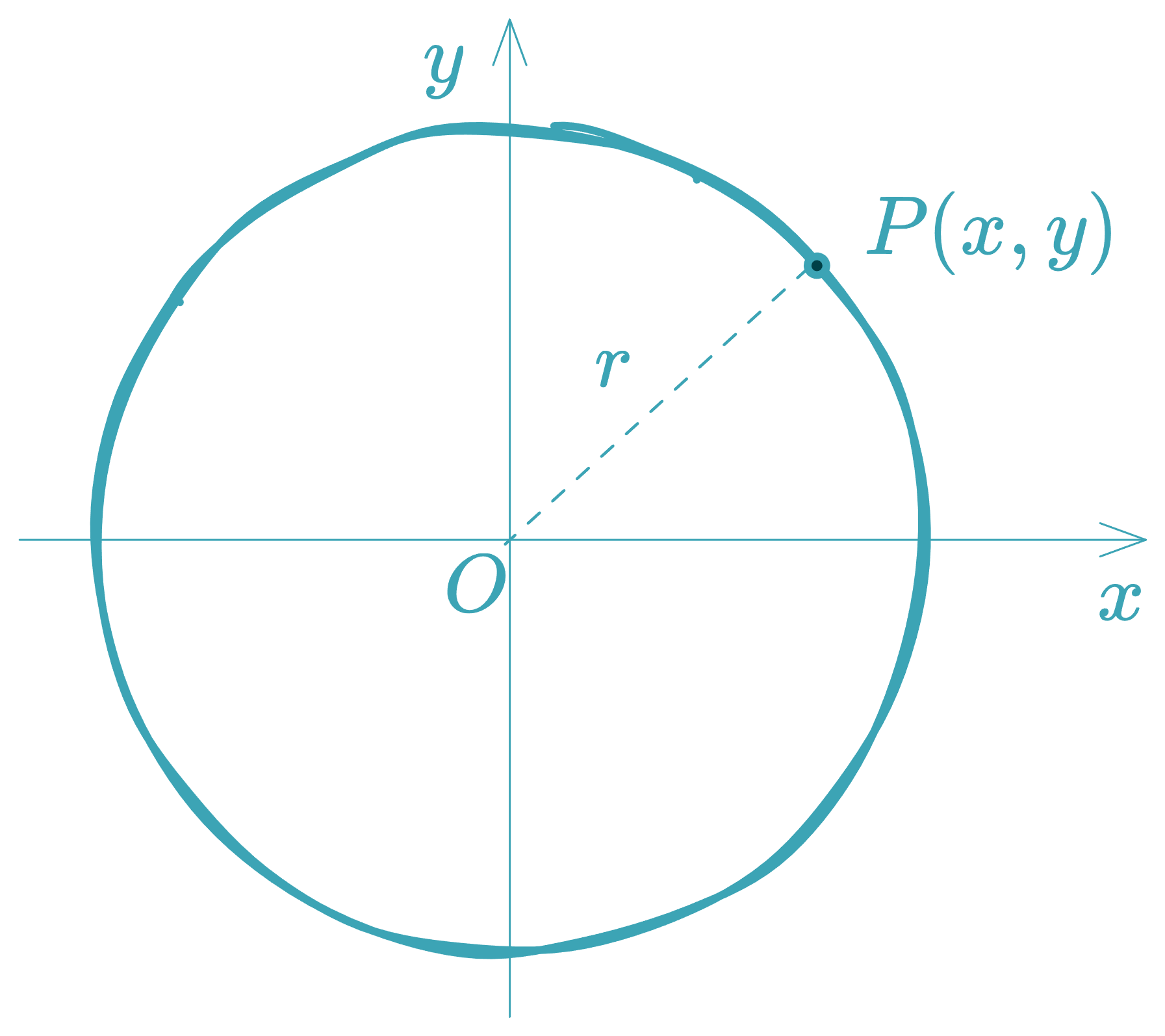
Cas particuliers :
- Si : → le cercle unité.
- Si : → représente uniquement le point .
Cercle tangent aux axes de coordonnées
-
Tangent à l’axe des :
Centre en , rayon →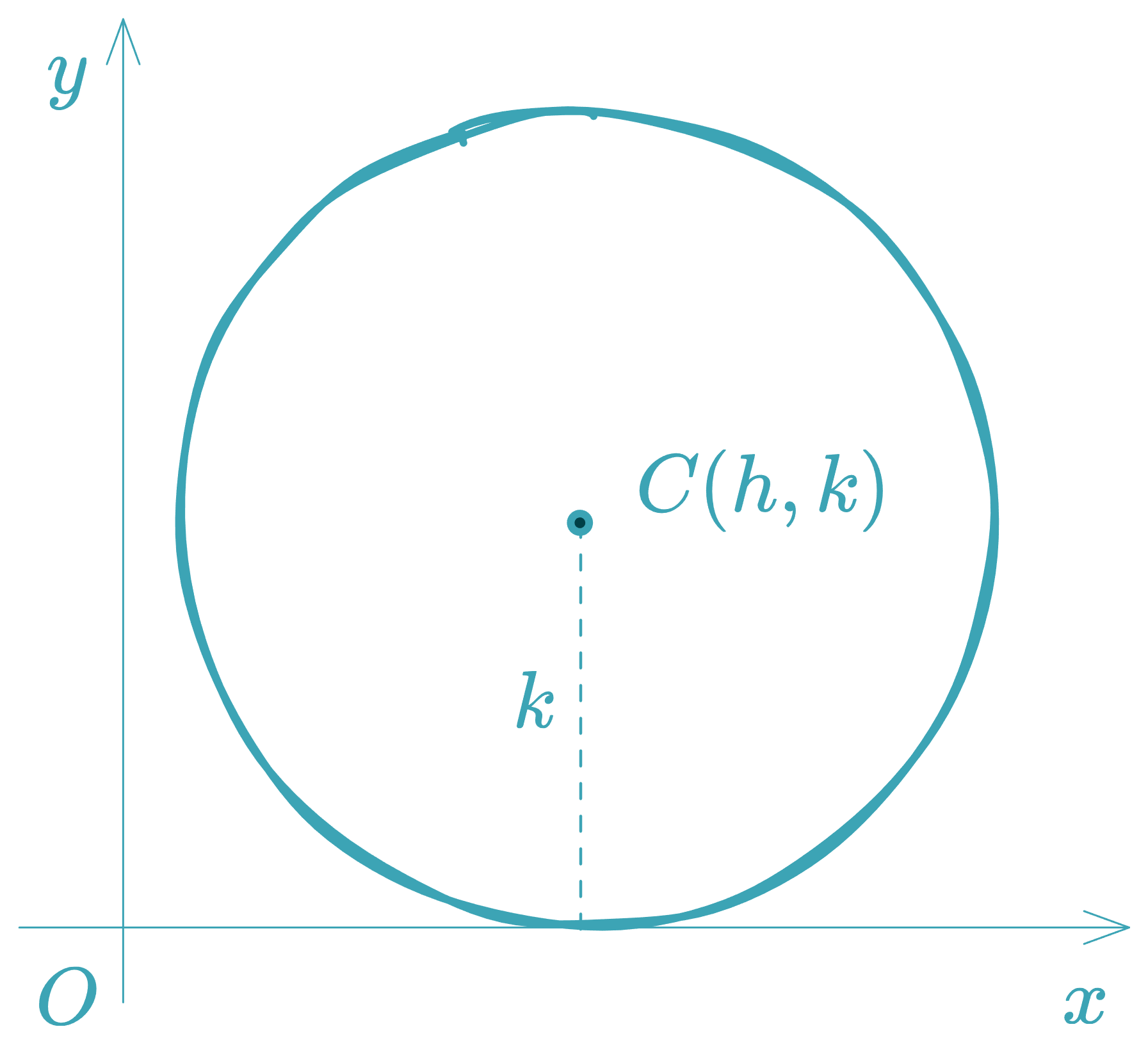
-
Tangent à l’axe des :
Centre en , rayon →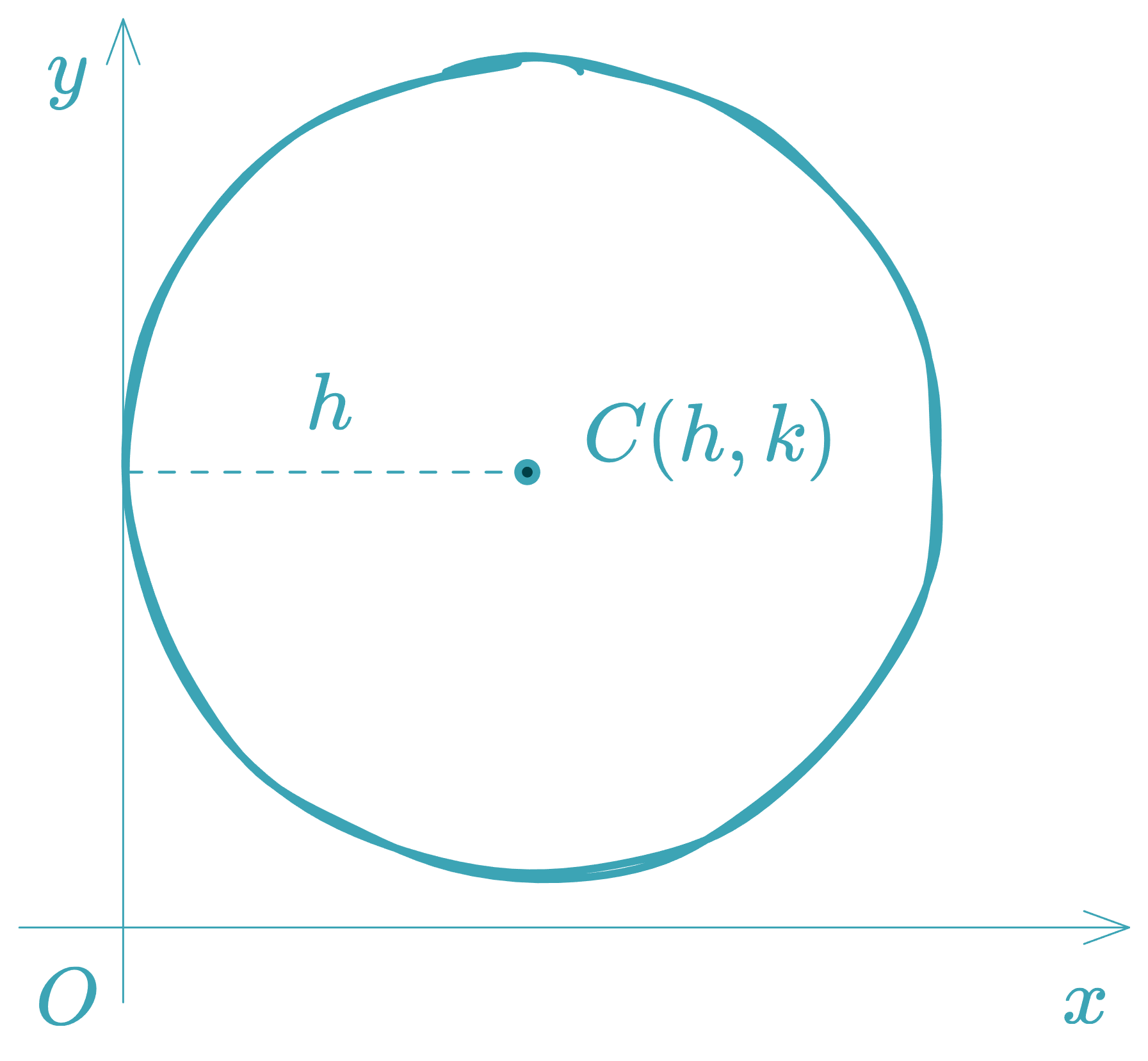
3. Équations paramétriques
Soient le centre et le rayon . Tout point du cercle s’écrit :
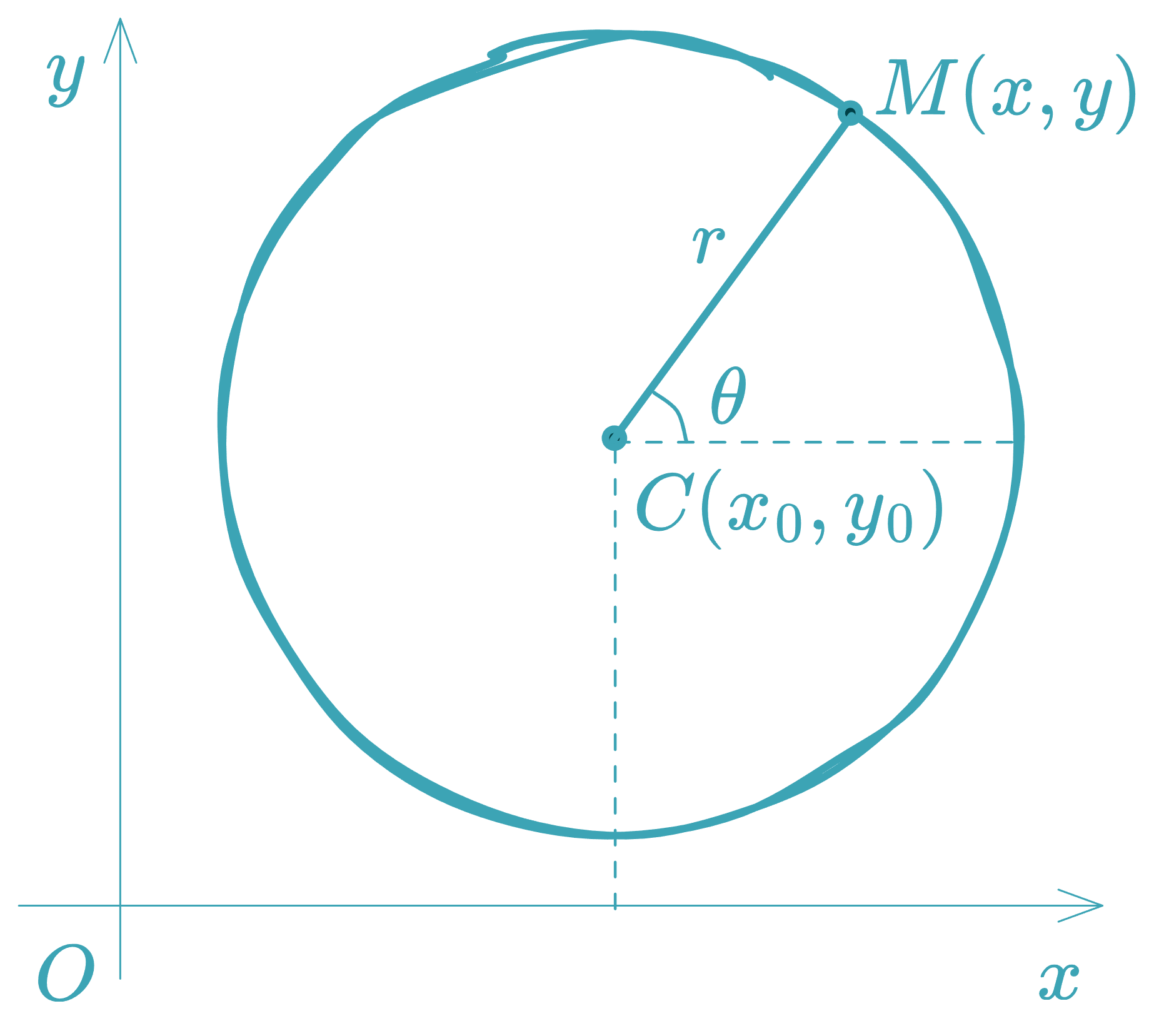
où est l’angle mesuré à partir de l’axe des positif.
4. Équation polaire
- Cercle général (centre en , rayon ) :
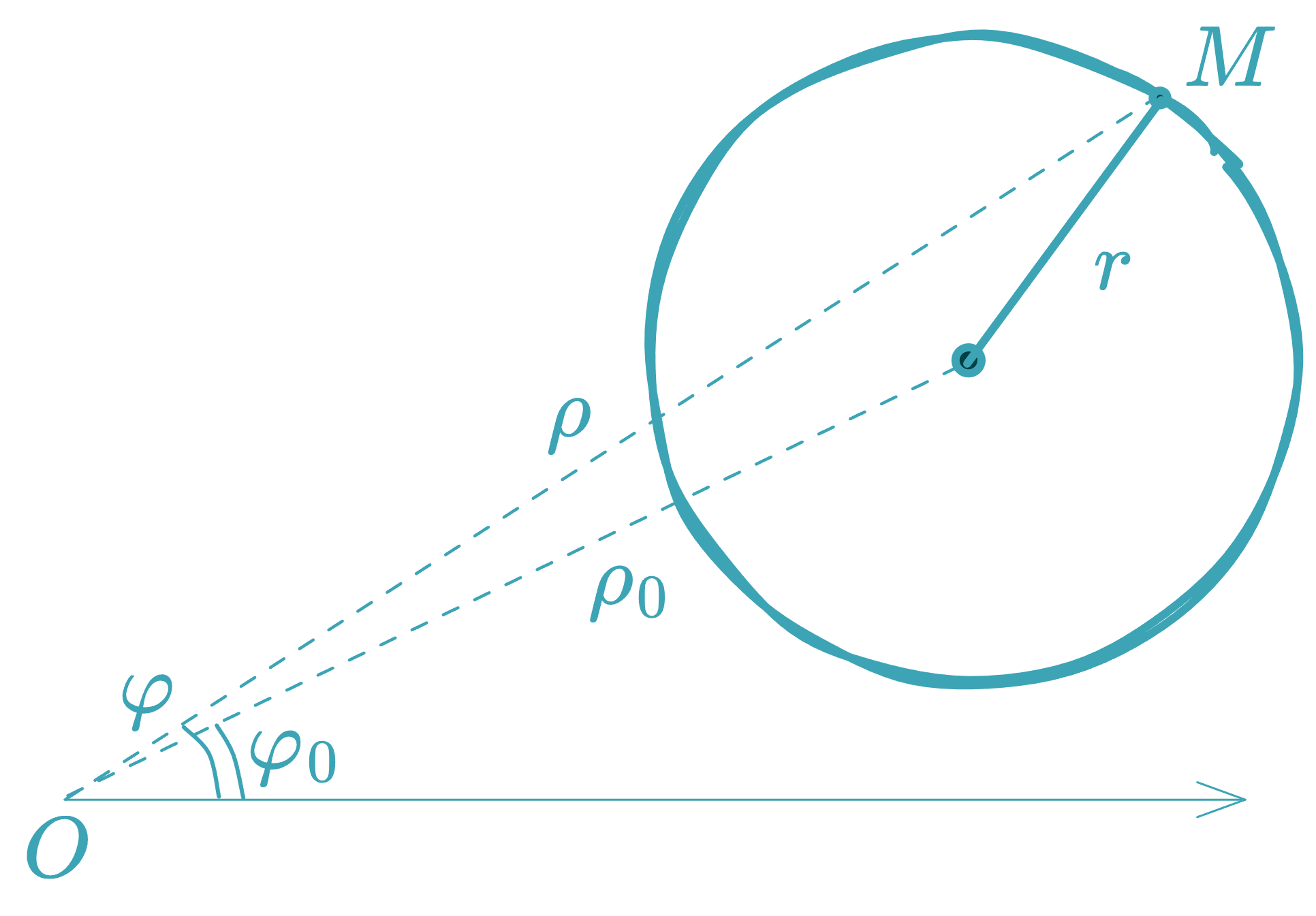
title: Remarque :
Certains ouvrages utilisent un signe plus, mais la forme ci-dessus est conforme à la loi des cosinus et est préférée pour la cohérence.
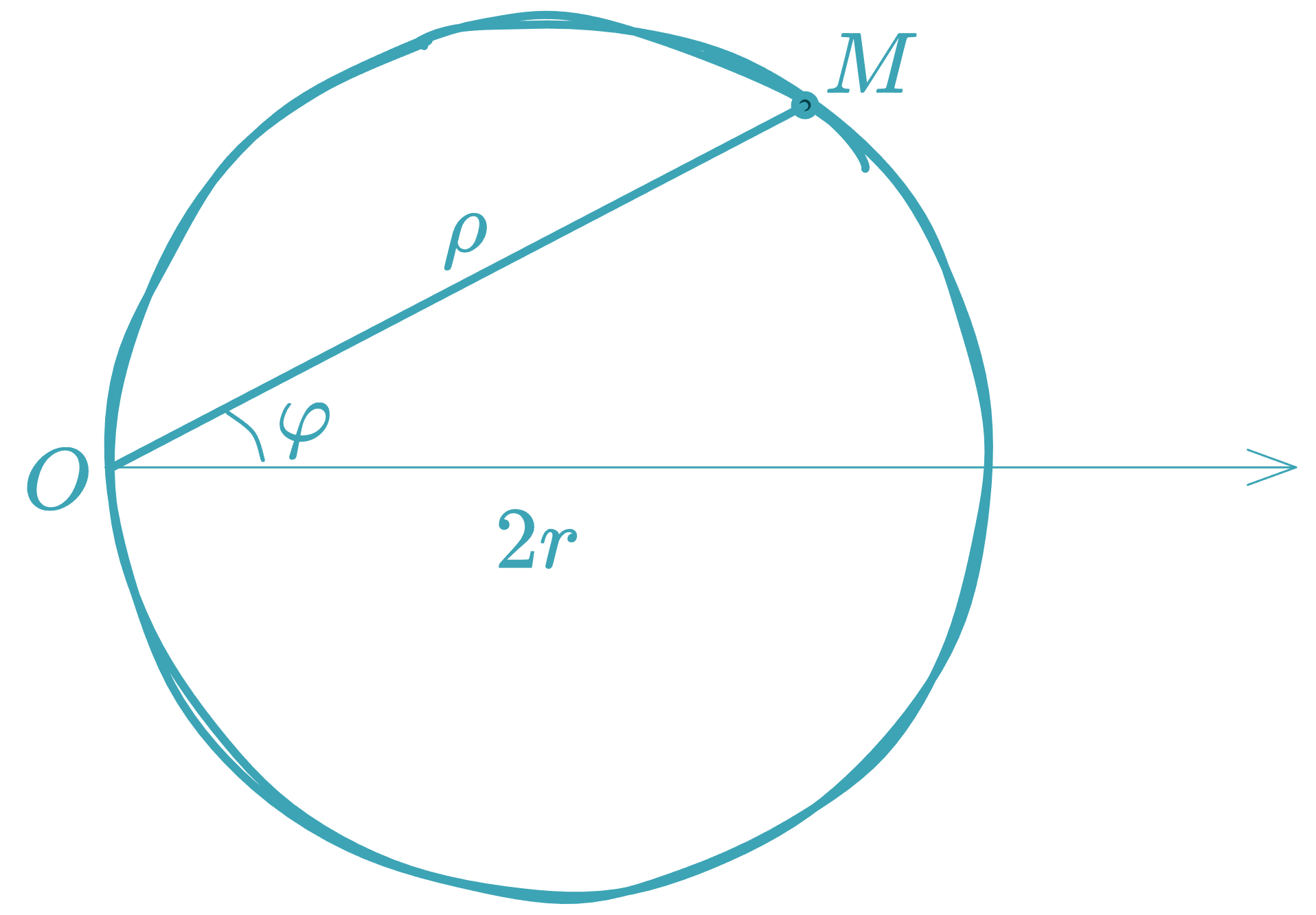
- Cas particulier : Cercle passant par le pôle avec centre sur l’axe polaire () :
5. Forme générale de l’équation
- Centre :
- Rayon :
title: Condition pour un cercle réel
$$\left(\dfrac{D}{2}\right)^2 + \left(\dfrac{E}{2}\right)^2 - F > 0$$
- Si l’expression est nulle, l’équation représente un **cercle ponctuel**.
- Si elle est négative, elle représente un **cercle imaginaire** (aucun point réel).
Détermination d’un cercle
Trois conditions indépendantes sont nécessaires pour déterminer de façon unique un cercle. Les cas courants incluent :
- Trois points non alignés.
- Centre et rayon.
- Centre et un point du cercle.
- Deux points et la tangente en l’un d’eux.
- Un point et deux tangentes.
On substitue les conditions données dans la forme canonique ou générale et on résout le système d’équations obtenu.
Faisceaux de cercles
Soient deux cercles :
Le faisceau de tous les cercles passant par leurs points d’intersection est donné par :
Équivalemment :
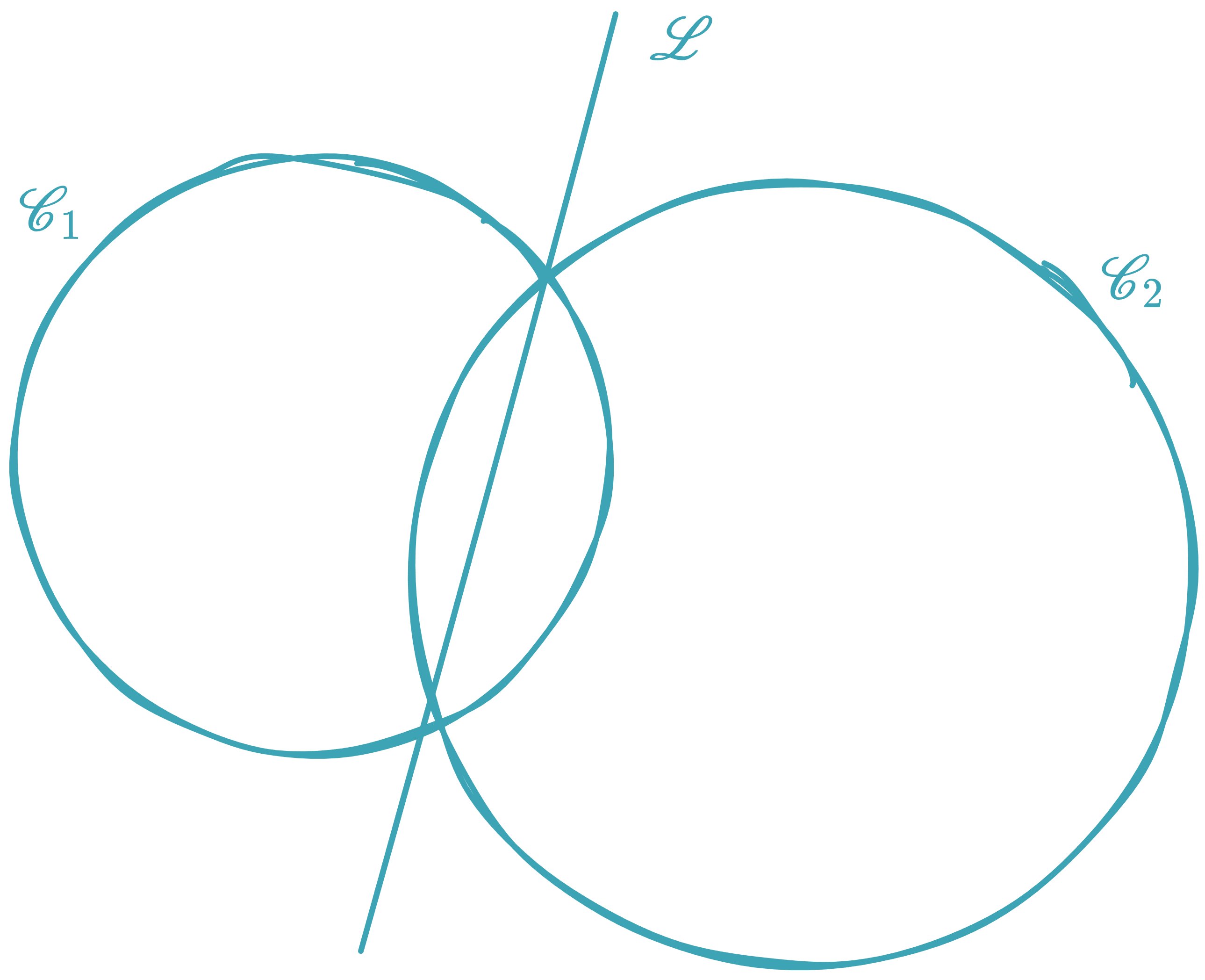
title: Remarque :
L’équation $\mathscr{C}_1 - \mathscr{C}_2 = 0$ donne l’**axe radical** — la droite constituée de tous les points ayant même puissance par rapport aux deux cercles.
Droites tangentes à un cercle
1. Tangente en un point du cercle
- Cercle centré à l’origine () :
- Cercle de centre :
2. Condition de tangence pour une droite
Soit une droite et un cercle de centre et de rayon . La droite est tangente si et seulement si la distance perpendiculaire du centre à la droite est égale au rayon :
Transformations de coordonnées
1. Translation des axes
Si les axes sont translatés de sorte que la nouvelle origine soit en , les coordonnées sont liées par :
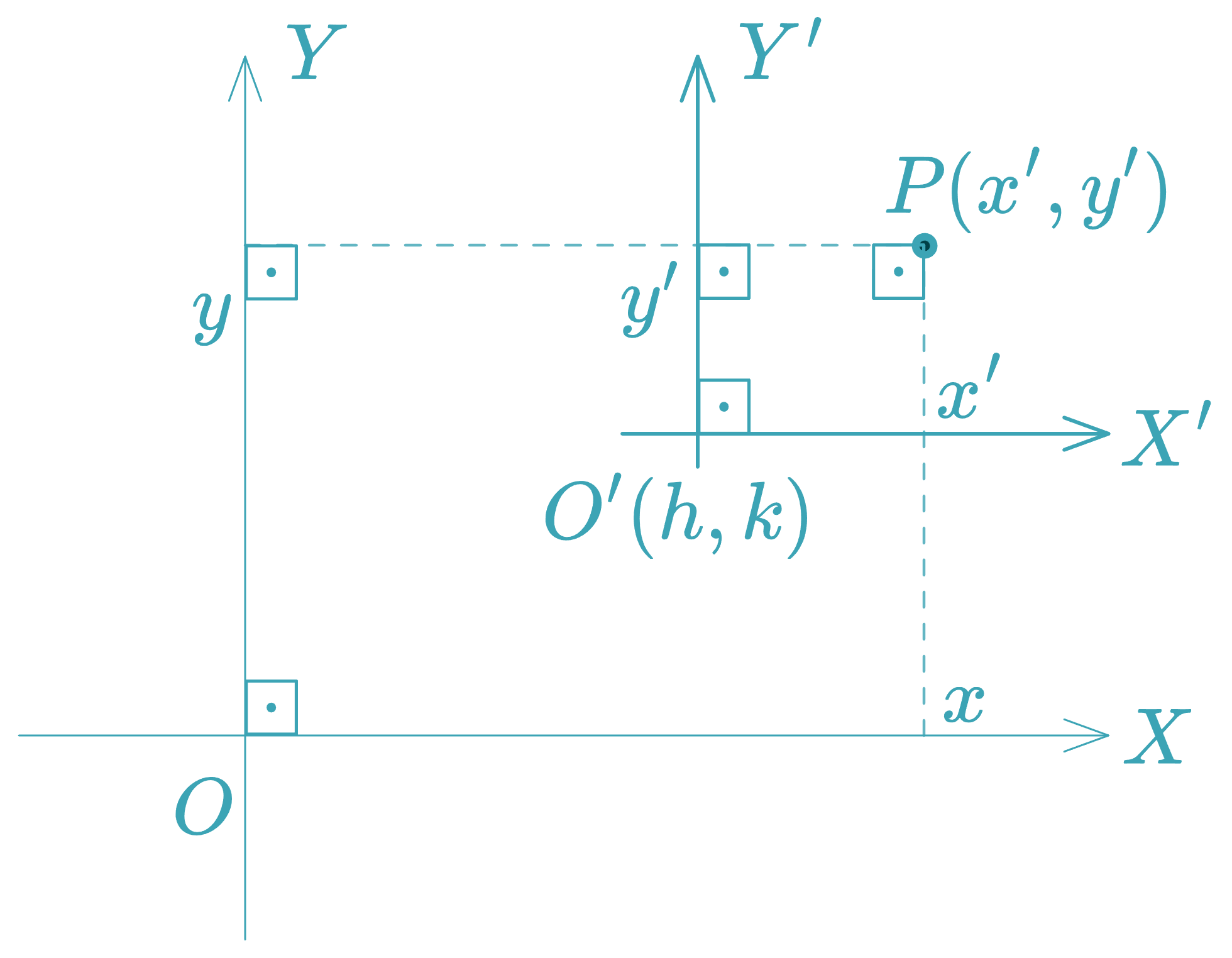
Cette transformation élimine les termes linéaires dans l’équation générale, la ramenant à la forme centrée.
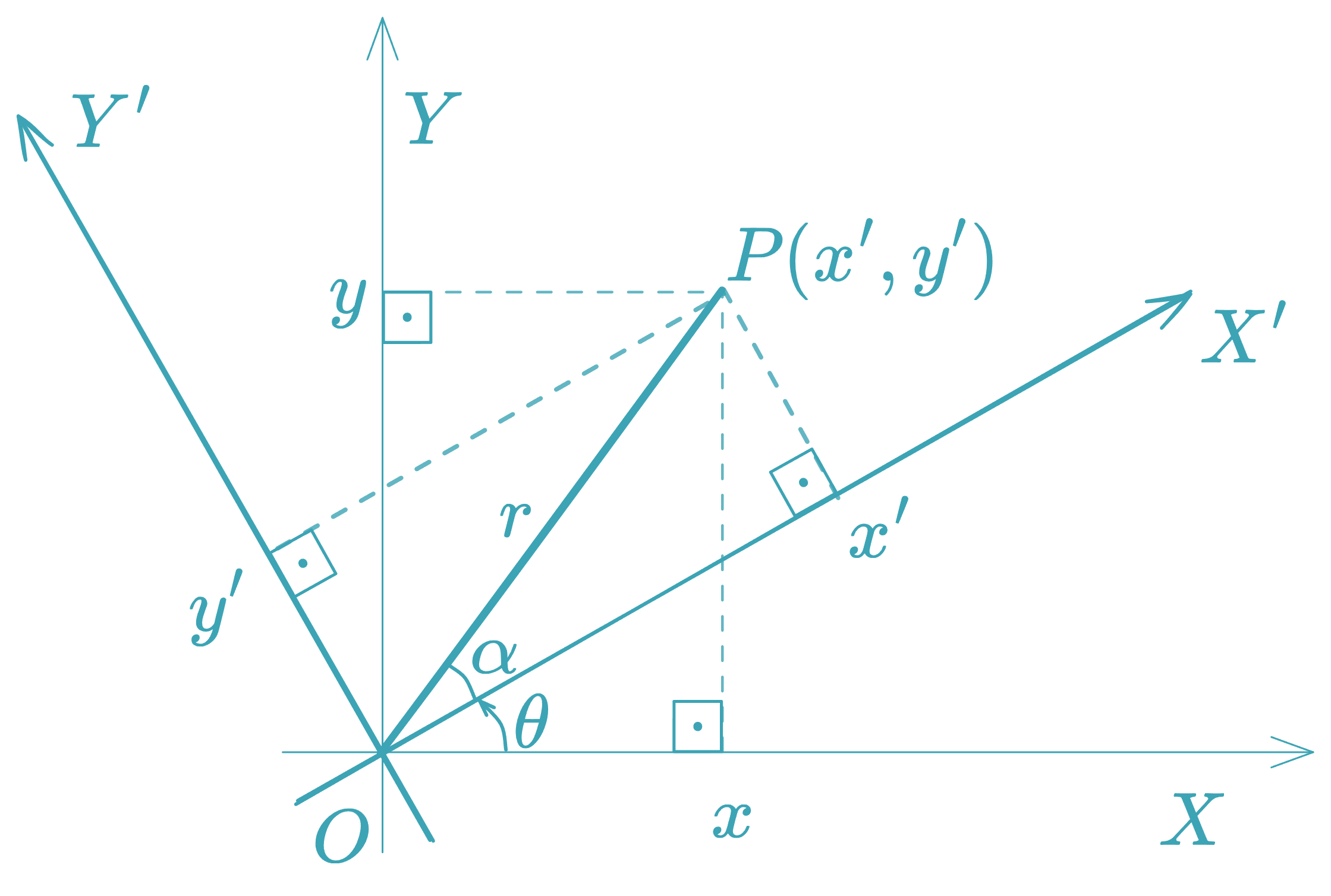
2. Rotation des axes
En tournant les axes d’un angle , les coordonnées anciennes et nouvelles sont liées par :
3. Élimination du terme dans les coniques
Pour une équation quadratique générale
le terme mixte est éliminé en tournant les axes d’un angle satisfaisant :
Si , alors .
title: Remarque :
Bien que le **cercle ne contienne jamais de terme $xy$** (en raison de sa symétrie de rotation), cette méthode est essentielle pour étudier les autres coniques et est incluse ici par souci de complétude dans le cadre des transformations de coordonnées.