Vectors
Definición
Un vector es una magnitud física que se caracteriza por tener:
- Módulo o magnitud: longitud del vector.
- Dirección: orientación en el espacio.
- Sentido: indica hacia dónde apunta el vector.
Se representa como:
Representación de un vector
- Gráficamente: mediante una flecha que va desde un punto inicial hasta un punto final.
- Analíticamente:
- En 2D:
- En 3D:
Gráficamente
- En 2D:
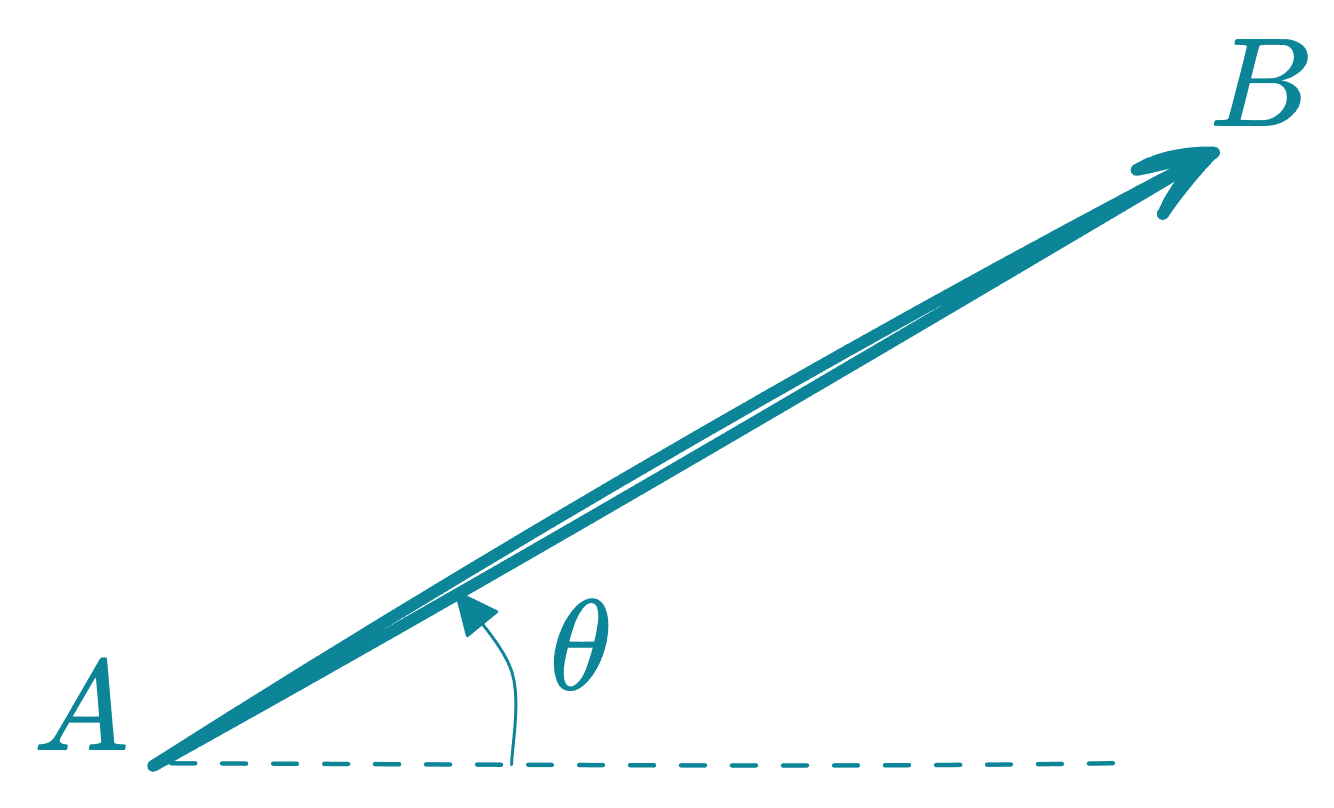
Donde:
- : se lee vector AB.
- : se lee módulo del vector AB.
- : su medida nos indica la dirección del vector; se mide en sentido antihorario respecto de la horizontal (en dos dimensiones).
Tipos de vectores
Vectores colineales
Son aquellos que se encuentran contenidos en una misma línea de acción.
:::hint
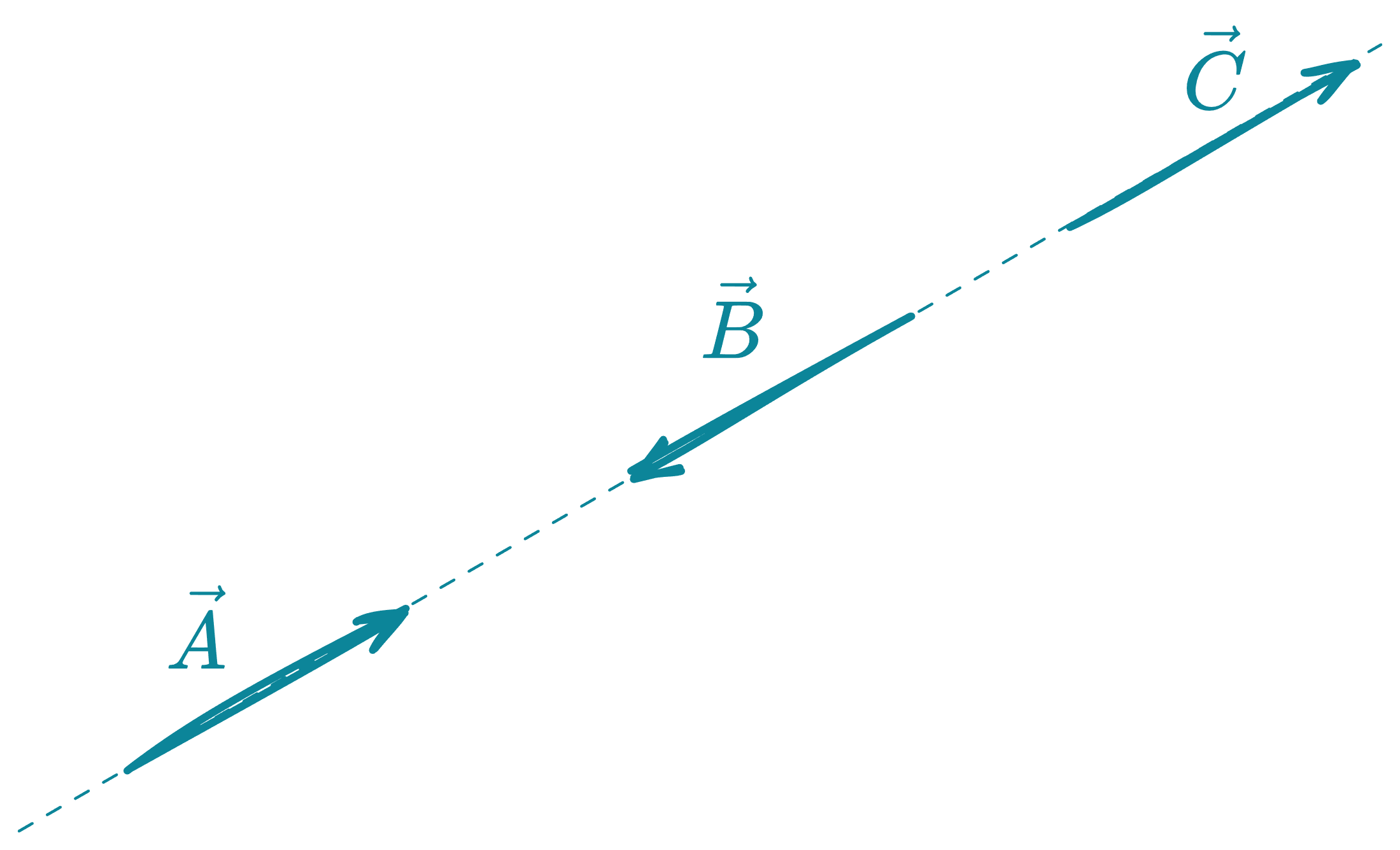
, y son vectores colineales porque están en una misma línea de acción.
:::
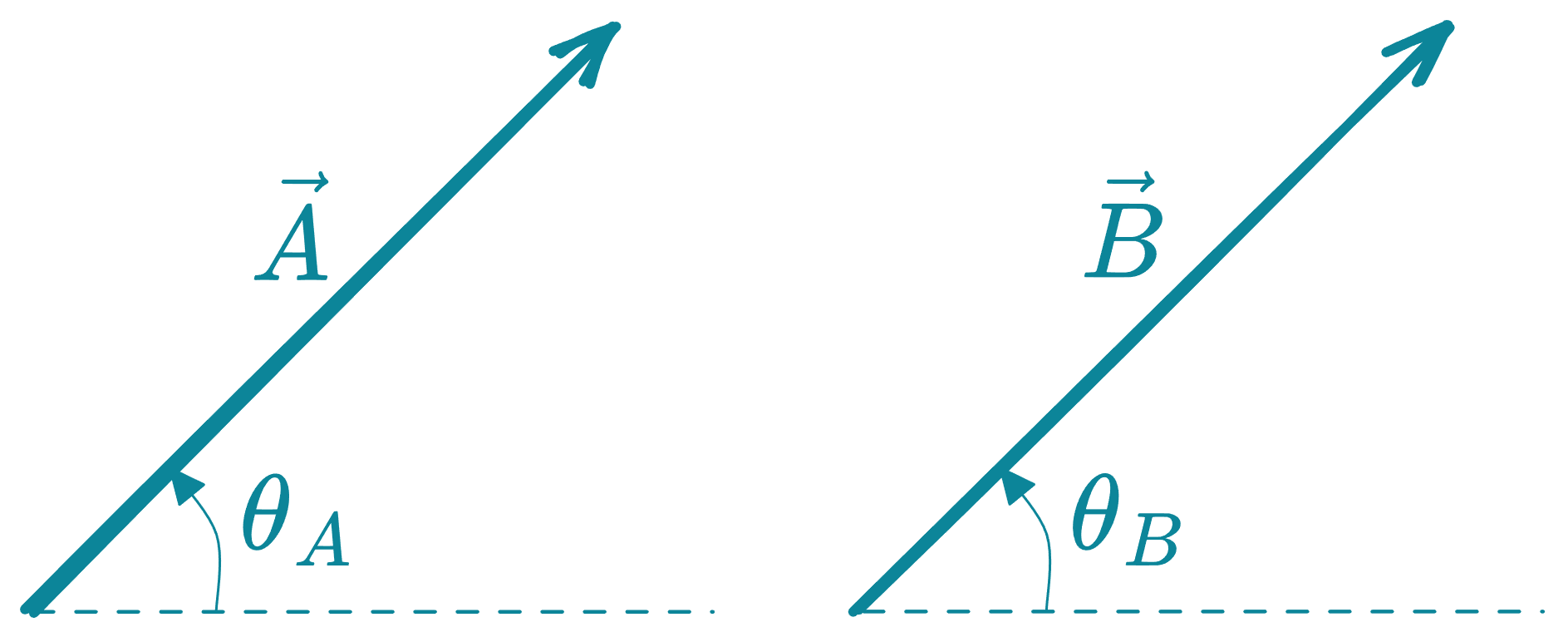
Vectores paralelos
Son aquellos que tienen sus líneas de acción respectivamente paralelas.
:::hint
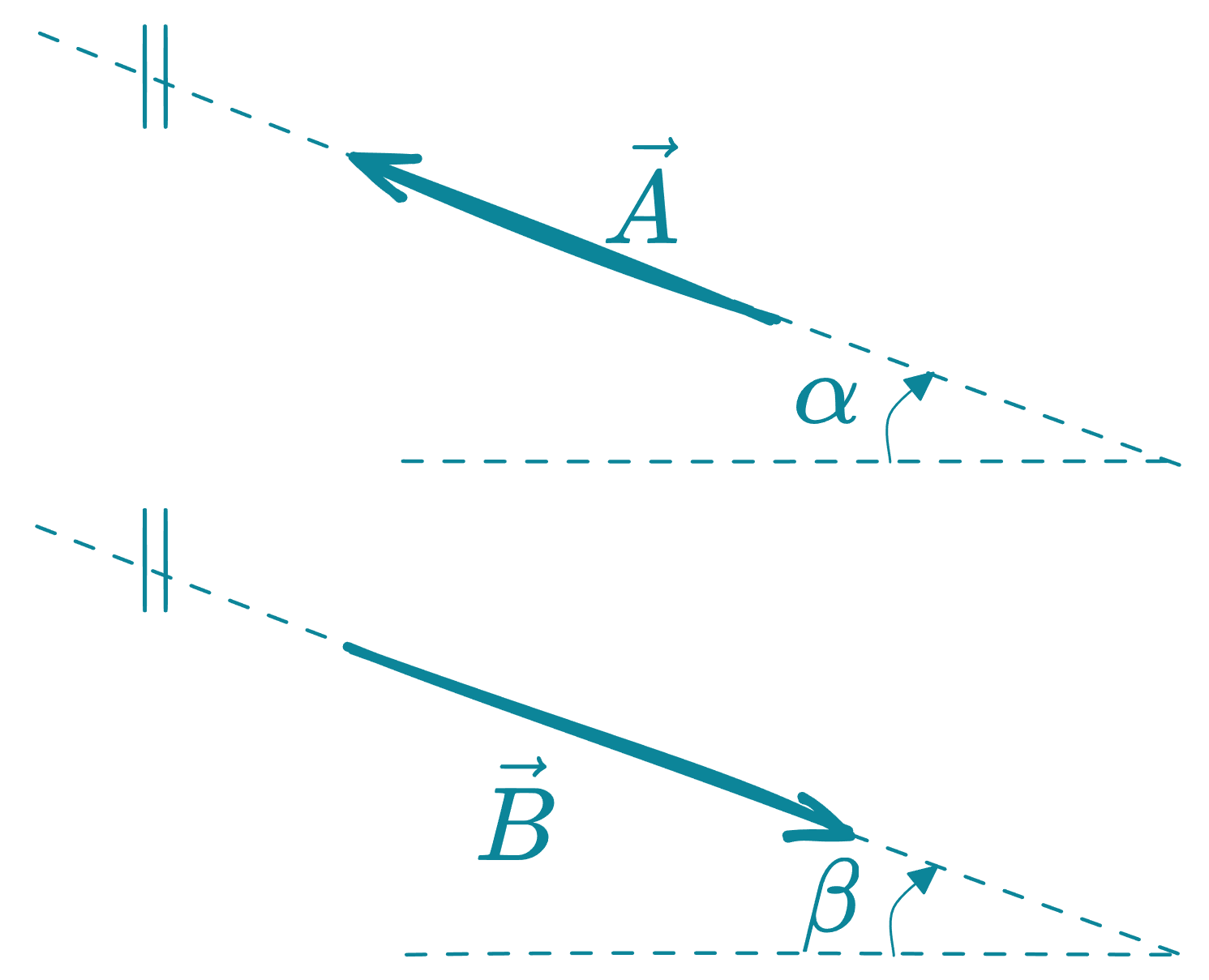
y son vectores paralelos porque sus líneas de acción son paralelas.
:::
Nota
Podemos expresar la condición de paralelismo matemáticamente: si
Vectores opuestos
Son aquellos que presentan igual módulo, pero sus direcciones se diferencian en .
:::hint
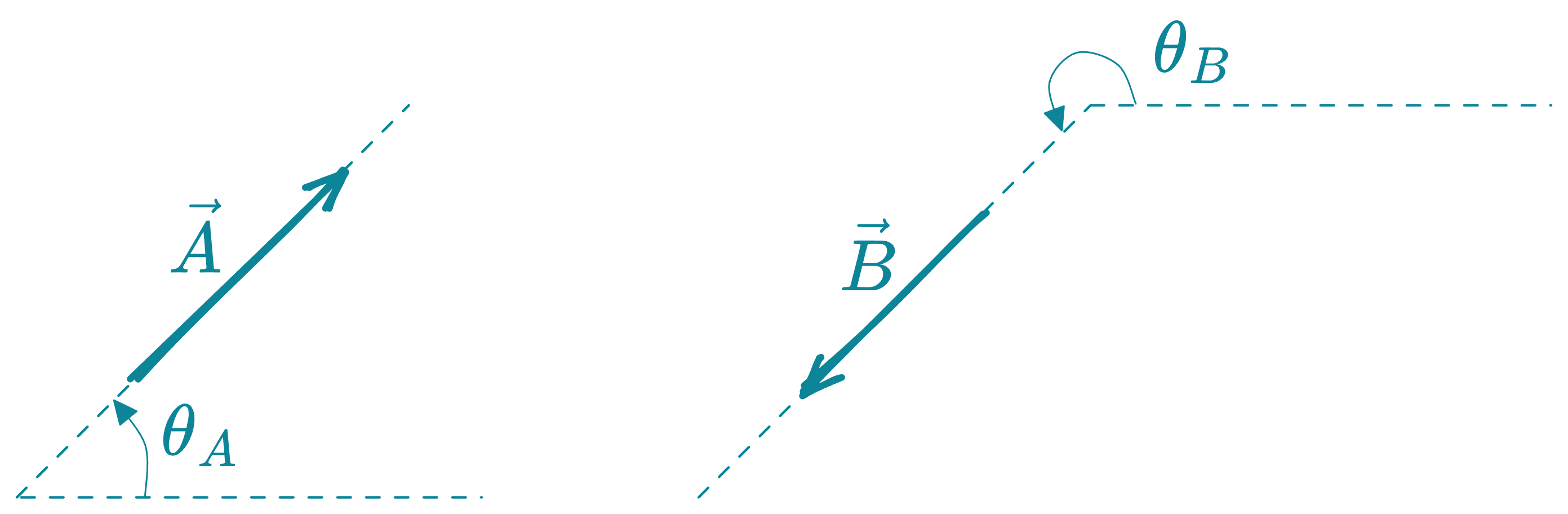
Sea
entonces
es el opuesto de .
:::
Vectores iguales
Son aquellos que presentan igual módulo e igual dirección.
Nota
Matemáticamente:
Si
entonces
los vectores son iguales.
Vectores coplanares
Son aquellos que se encuentran contenidos en un mismo plano.
:::hint
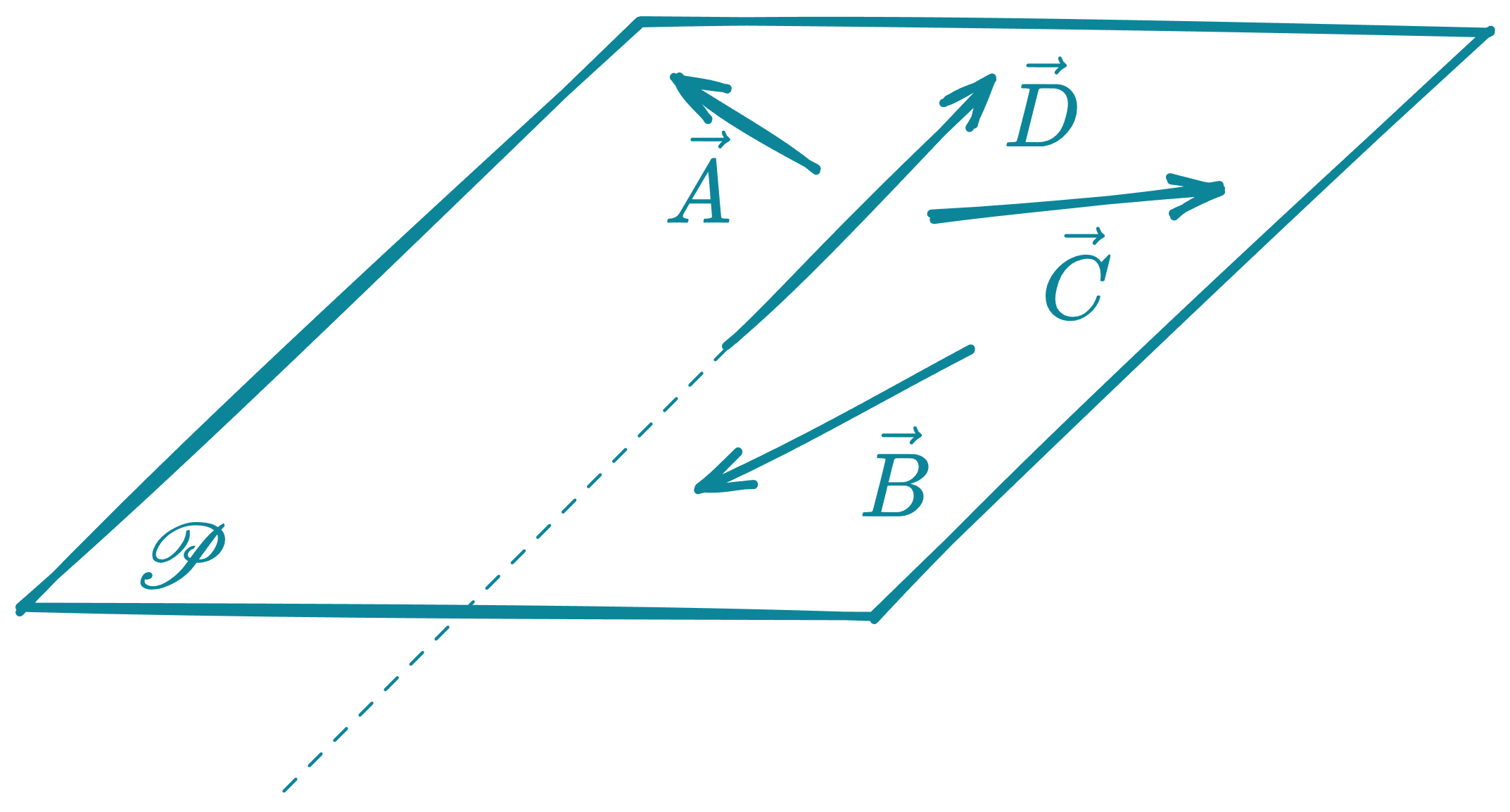
, y son vectores coplanares por estar en el mismo plano.
:::
Nota
Como no está contenido en el plano , no será coplanar con los demás vectores.
Vectores concurrentes
Son aquellos cuyas líneas de acción se cortan en un mismo punto.
:::hint
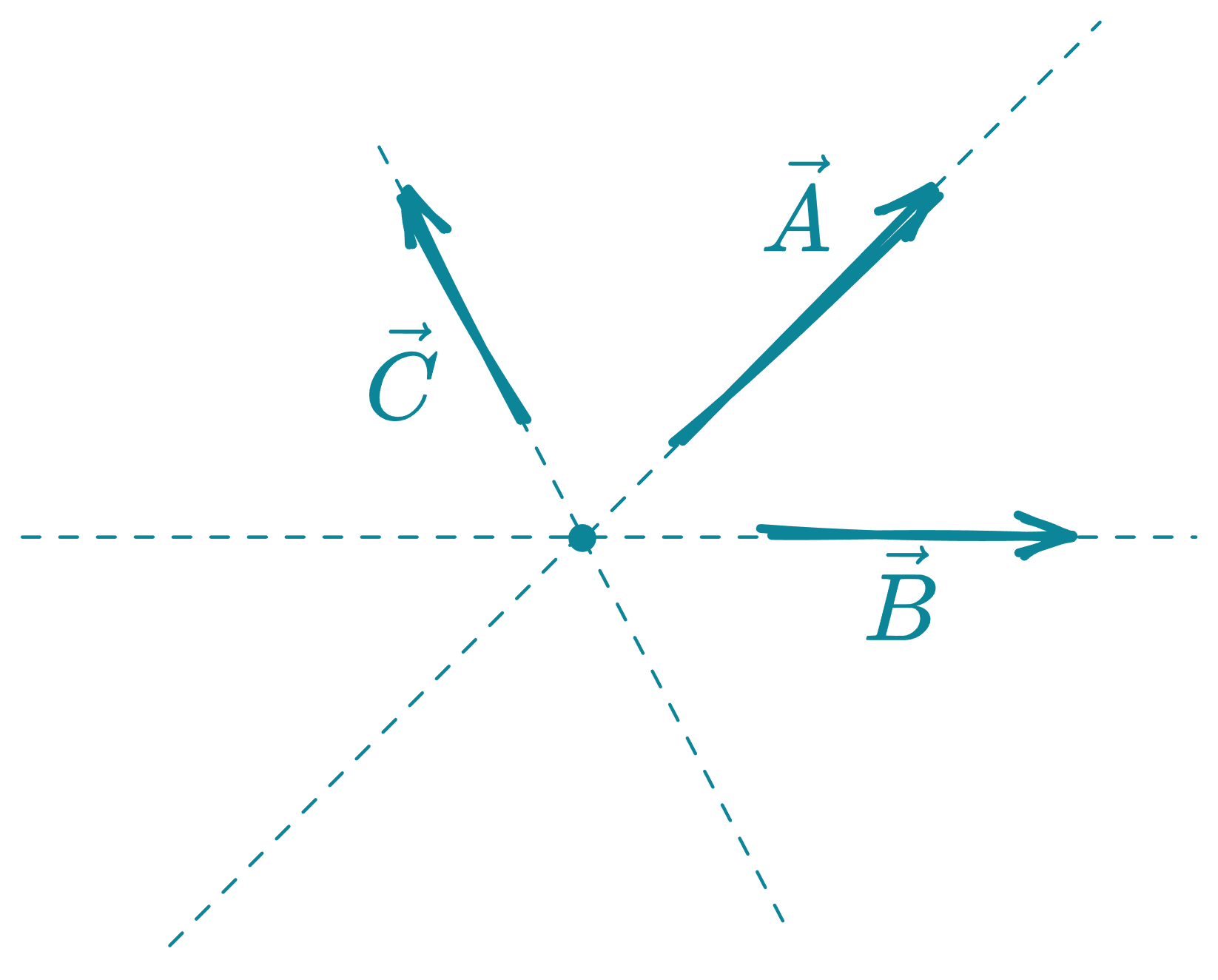
, y son vectores concurrentes porque todos concurren a un solo punto.
Punto de concurrencia: punto donde se intersectan las líneas de acción de los vectores.
:::
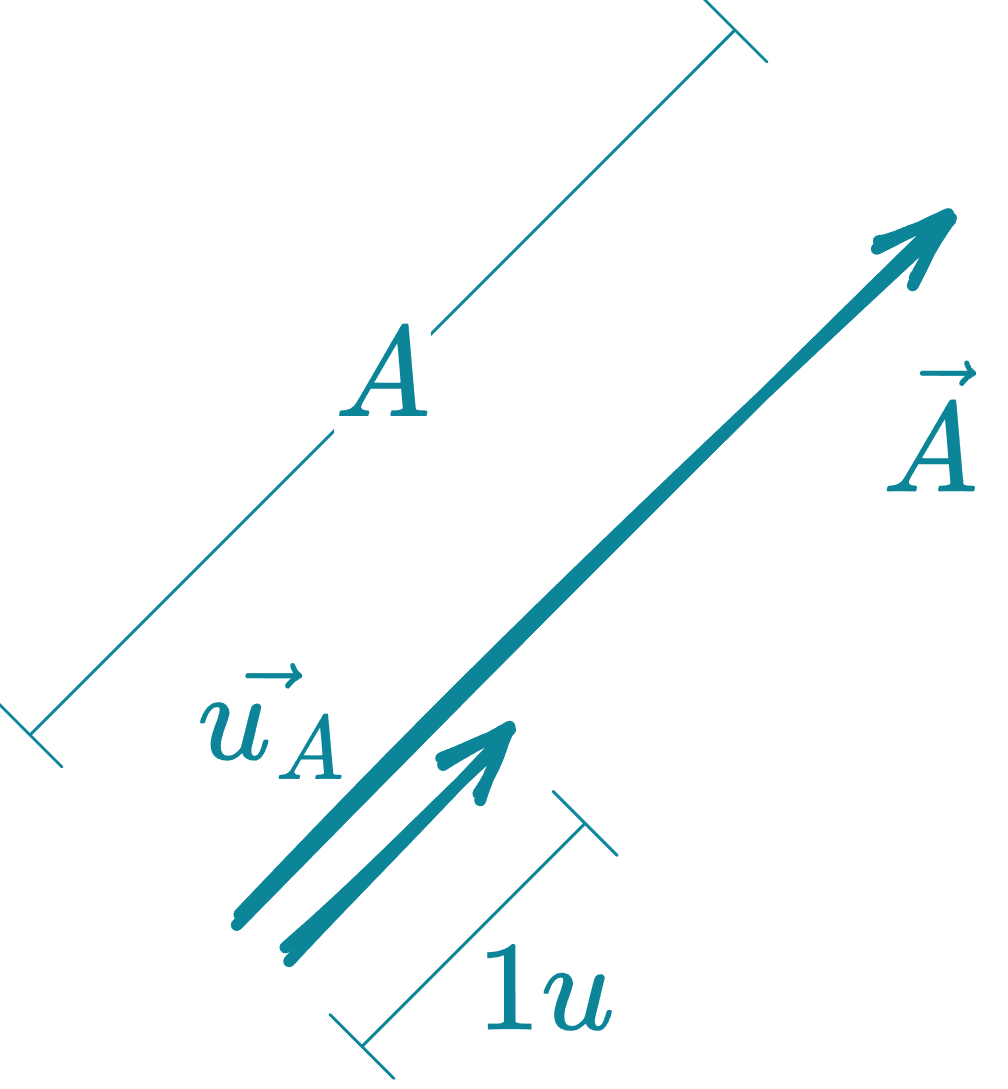
Vector unitario ()
Representa la dirección de un vector cualquiera y se caracteriza porque su módulo es igual a la unidad.
:::hint
Definición matemática:
El vector unitario asociado a un vector se define como:
- : vector original.
- : módulo (magnitud) del vector .
:::
Propiedad fundamental:
donde “u” representa la unidad de medida del sistema.
Recuerda
Un vector unitario tiene la misma dirección y sentido del vector original, pero magnitud 1.
Opearaciones con vectores
Métodos Gráficos
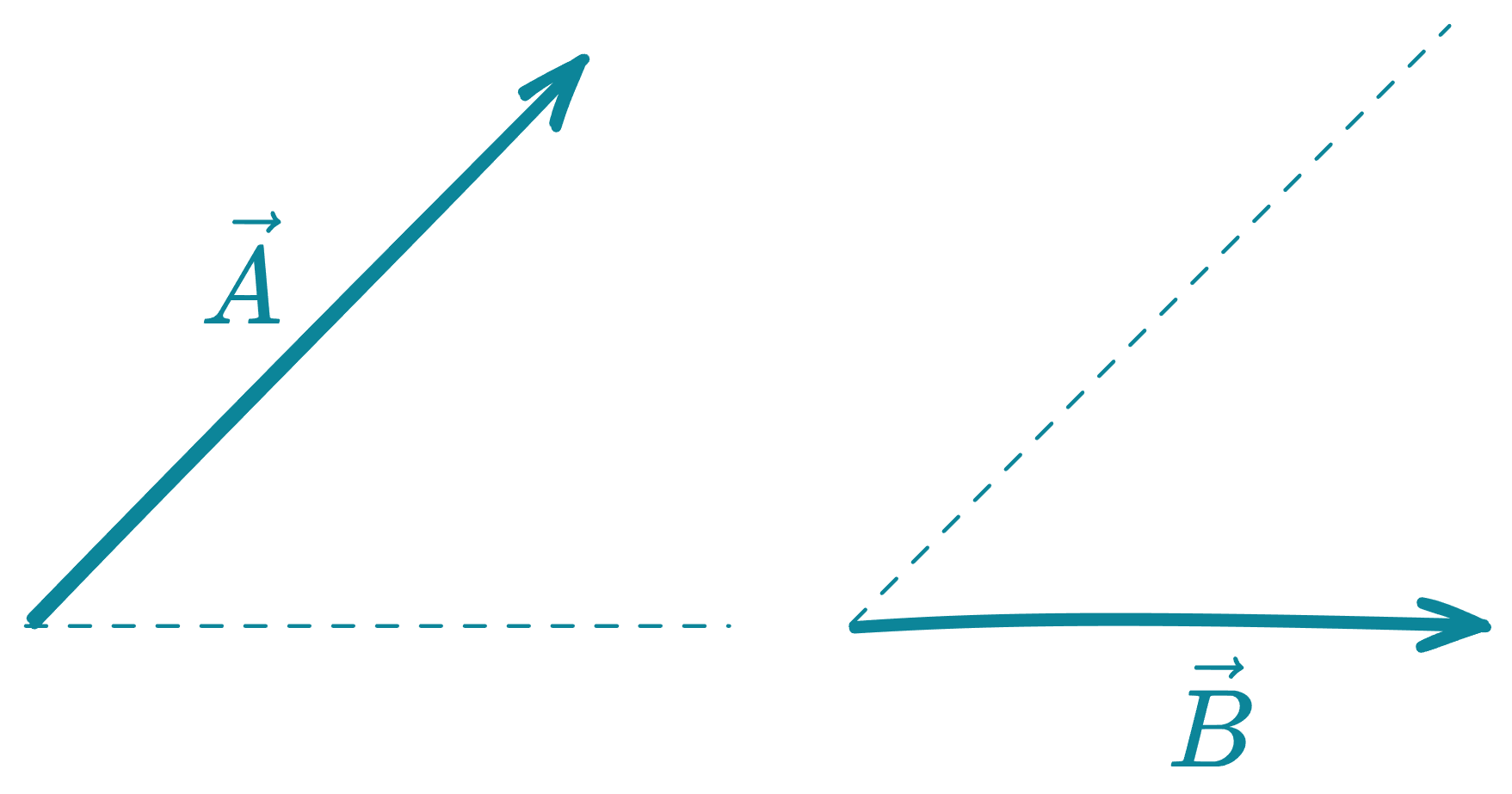
Método del triángulo
Nos permite hallar la resultante de dos vectores, consiste en graficar los vectores uno a continuación del otro, tal que el extremo del primero coincida con el origen del segundo vector. Su resultante se obtiene uniendo el origen del primero con el extremo del segundo vector.
Sean y los vectores.
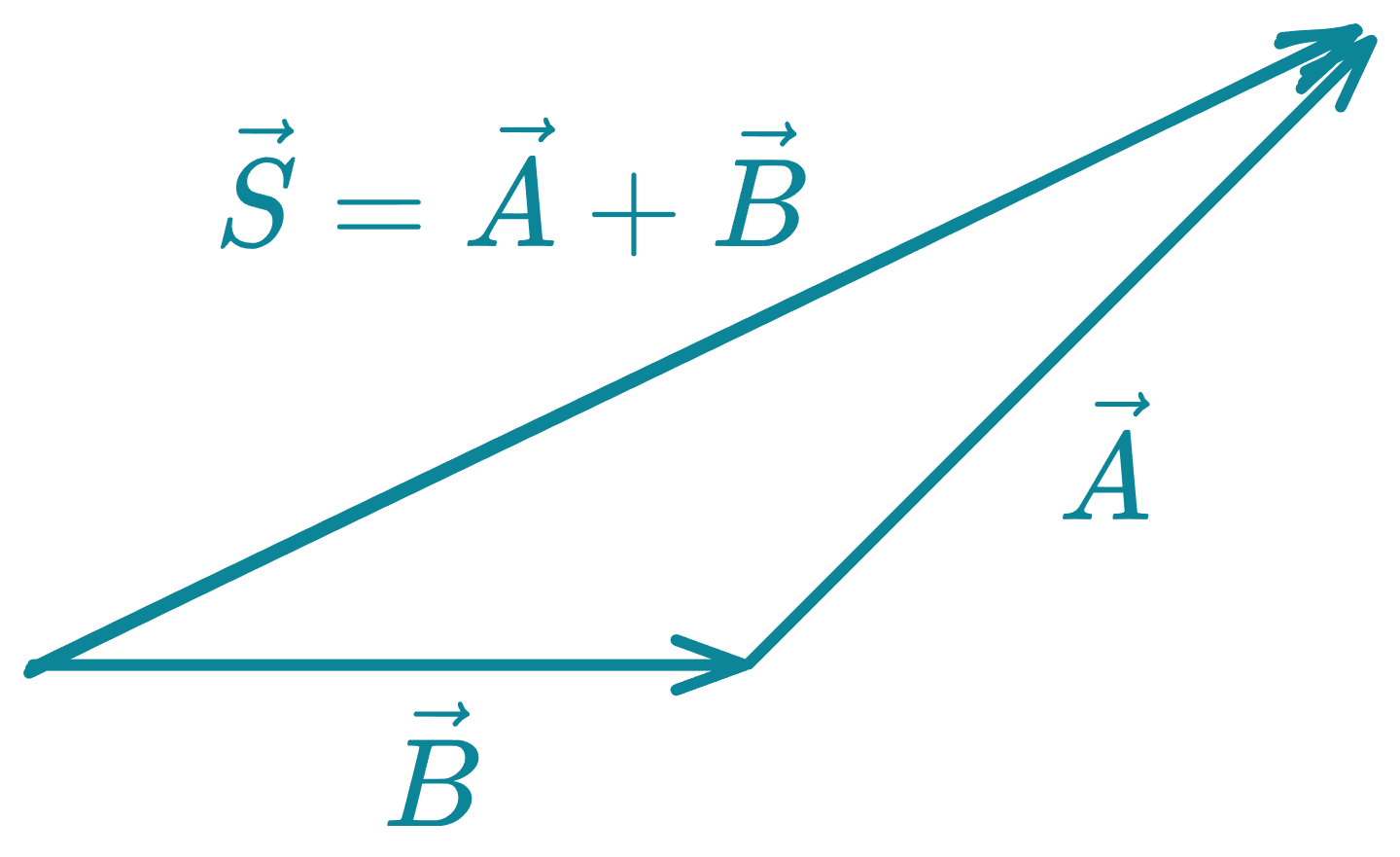
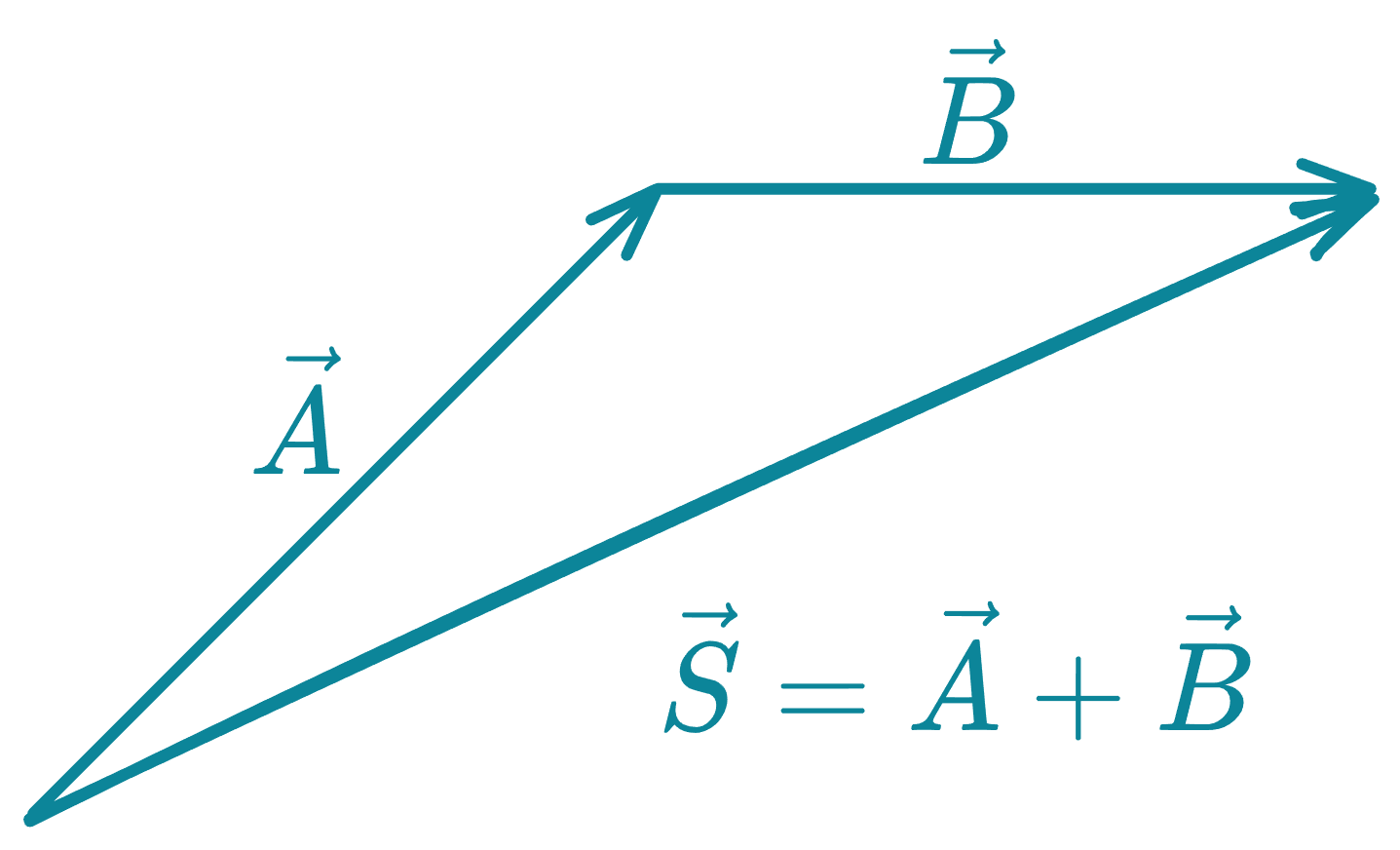
Nota
El orden de colocacion de los vectores, no altera la suma
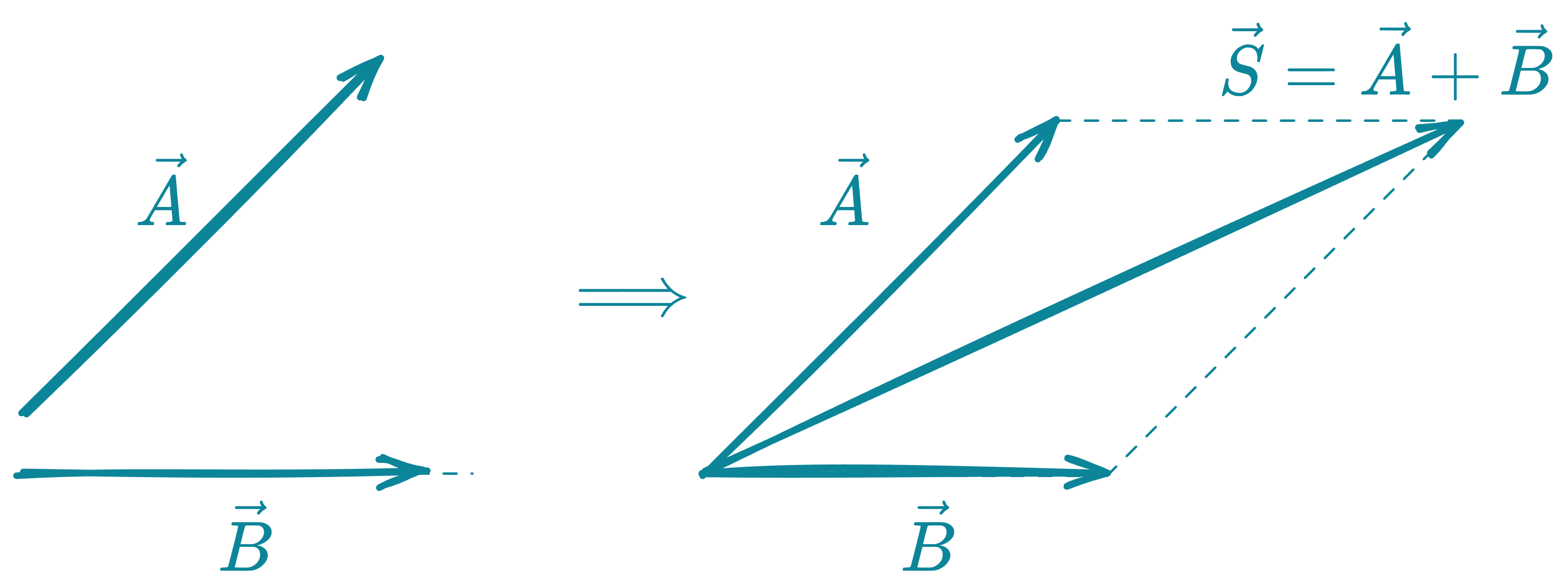
Método del paralelogramo
Es una variante del método del triángulo, solo que en este caso debemos hacer coincidir el origen de ambos vectores y a partir de los extremos trazamos rectas paralelas a los otros vectores formando así un paralelogramo.
Sean y los vectores.
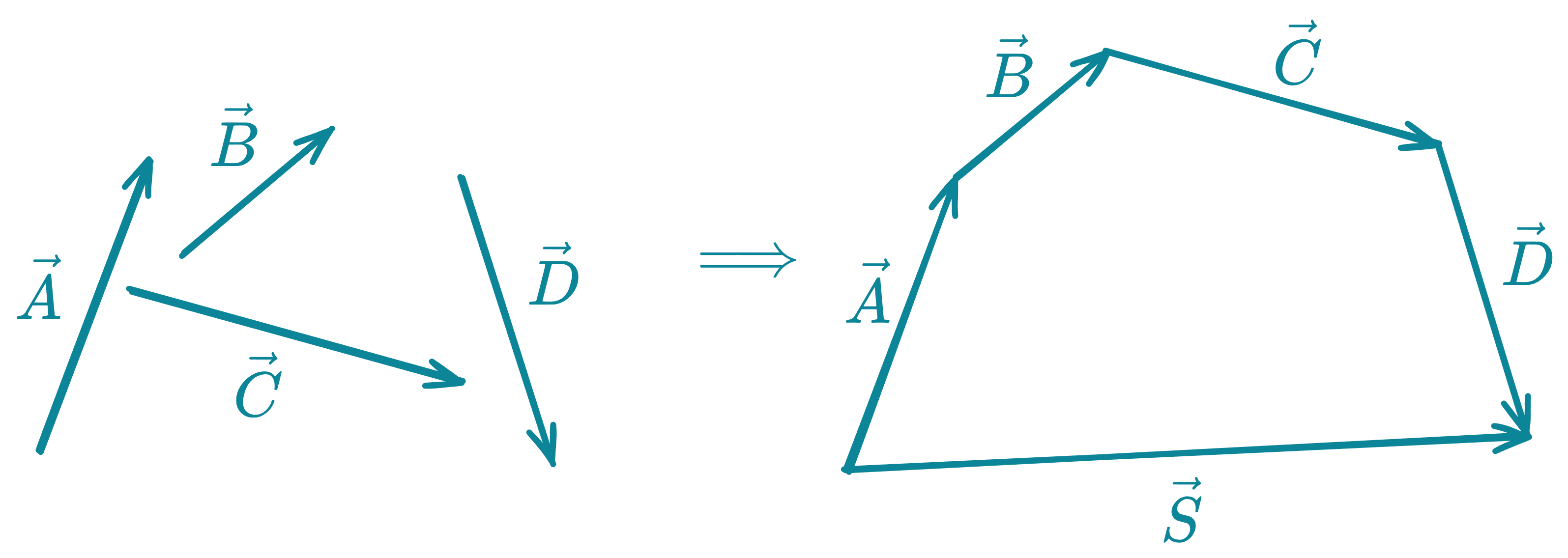
Método del polígono
Nos permite determinar la resultante de vectores. Consiste en colocar los vectores uno a continuación del otro, donde el vector resultante se obtiene uniendo el origen del primer vector con el extremo del último.
Sean los vectores libres.
Casos Particulares
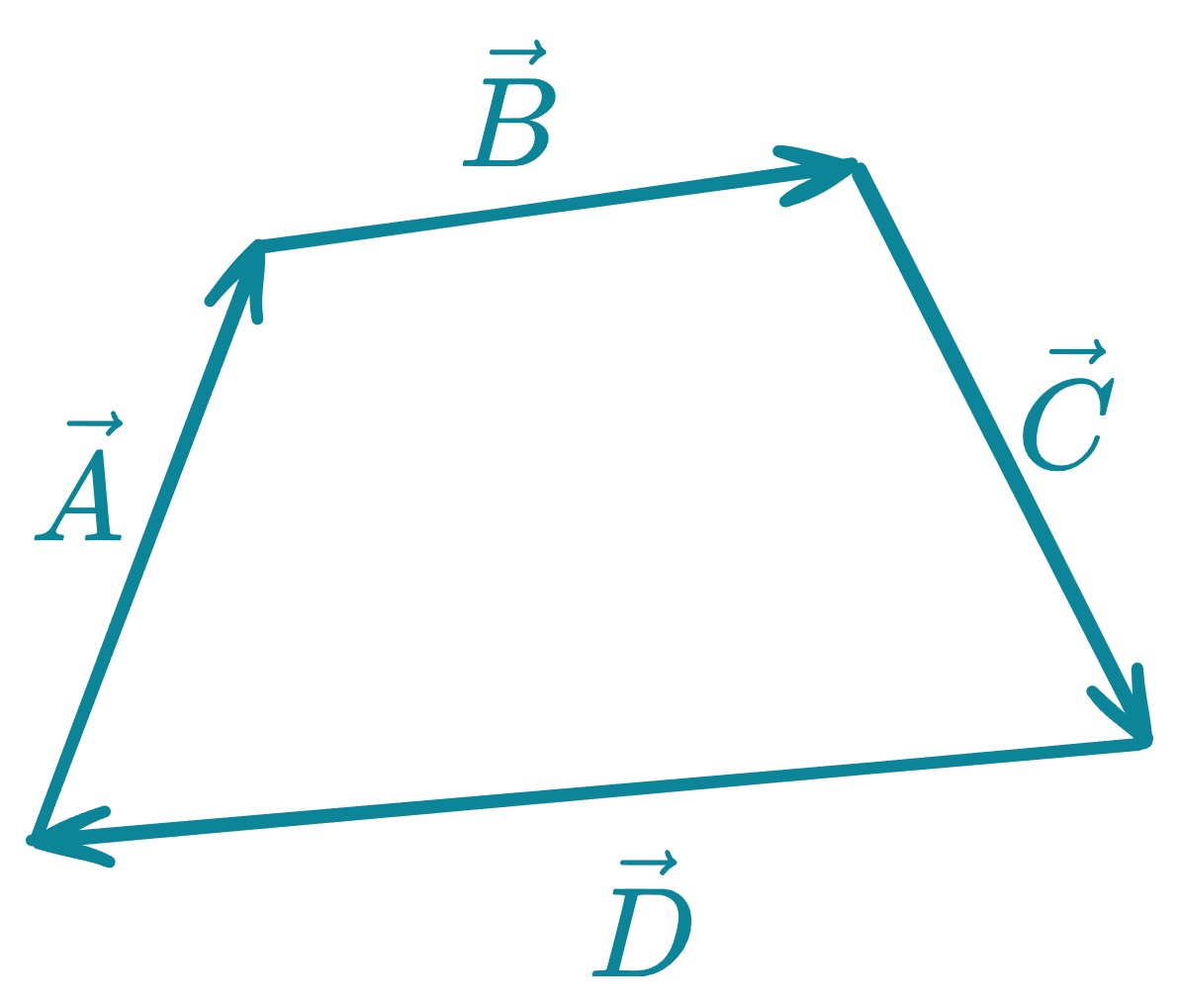
a) Vectores que forman un polígono cerrado y ordenado; la resultante es cero:
:::hint
Los vectores , , y se colocan cabeza con cola, formando un polígono cerrado. La resultante es nula:
:::
b) Vectores que forman un polígono cerrado y no ordenado; la resultante es diferente de cero:
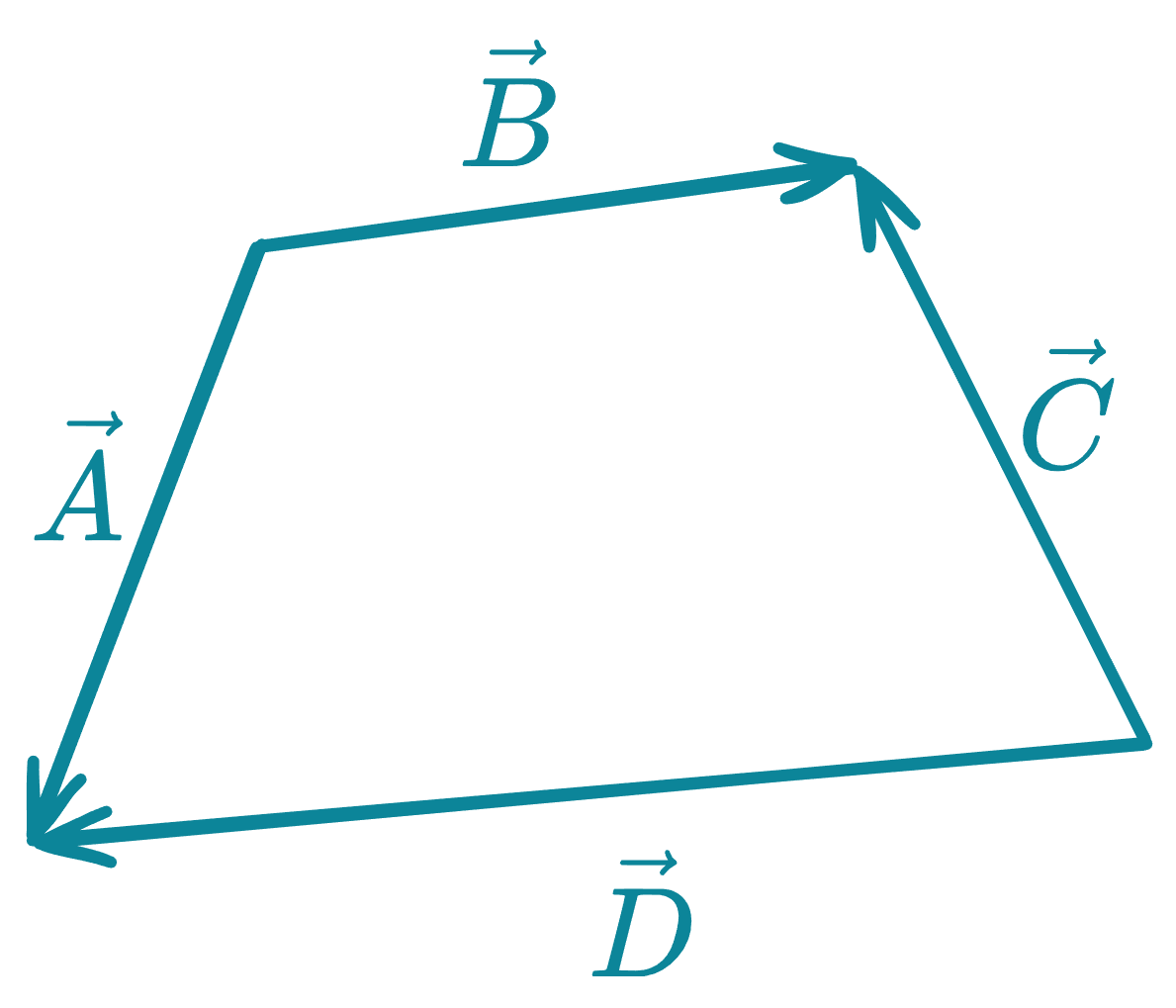
:::hint
Aunque los vectores , , y forman una figura cerrada, su disposición no sigue el orden “cabeza con cola” del método del polígono. Por lo tanto, la resultante no se anula:
:::
Métodos Analíticos
Método del triángulo
Podemos resolver un triángulo vectorial si conocemos algunos de sus lados y ángulos, usando la ley de senos.
:::hint
Sean , y vectores que forman un triángulo, cuyos módulos son , y , y cuyos ángulos opuestos son , y respectivamente.
:::
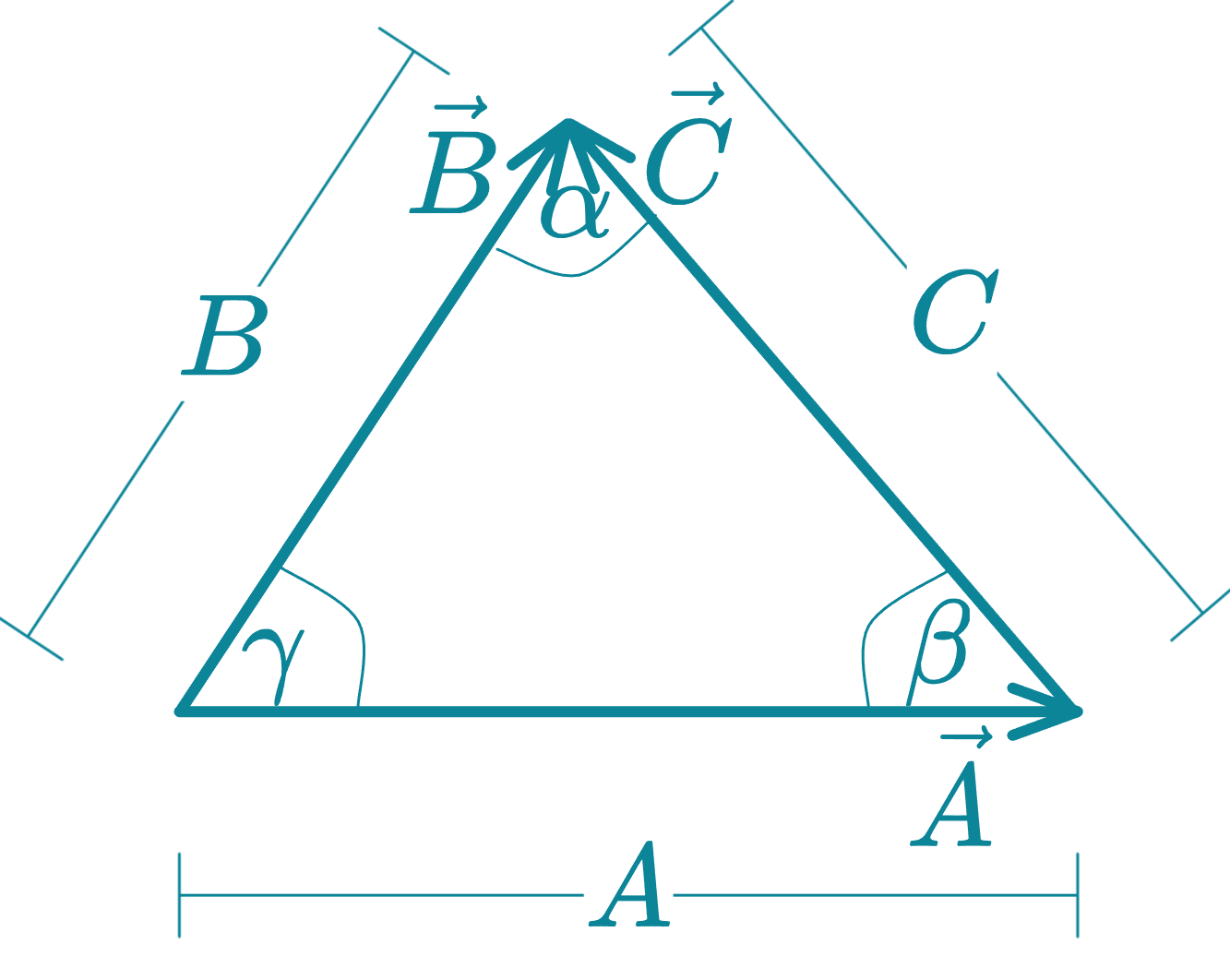
I. Ley de senos
II. Ley de cosenos